Végre hosszú idő után előkerült a PICkit a fiókból. Az [intlink id=”559″ type=”post”]el%u0151z%u0151 PIC[/intlink]-es próbálkozásom után most egy kicsit bonyolultabb probléma megoldására vállalkoztam. Konkrétan arra, hogy a kütyü képes legyen érzékelni valakinek a jelenlétét. Erre a leggyakrabban alkalmazott módszer infravörös fényt vetít a vizsgált térrész felé, és méri a visszaverődött fény mennyiségét. Minél több fény verődik vissza, annál közelebb van a tárgy, amiről visszaverődött. Az elmélet egyszerű, és mint azt a továbbiakban olvashatjátok, a gyakorlat se sokkal bonyolultabb.
Az első probléma ami felmerült, az a jelentős háttérzaj kérdése. Az infravörös tartományban a nap és a legtöbb mesterséges fényforrás is sugároz, ráadásul sokkal erősebben, mint egy ilyen alkalmazásban szóba jöhető infra-led. A háttérzaj és az infra-led jelét szétválasztani csak úgy lehet, ha modulált jelet sugározunk a térbe, és ezt a modulált jelet keressük a mért értékekben is. Léteznek olyan infra-vevők, melyek hardveresen támogatják a modulált jel érzékelését (pl. TSOP), de hasonló alkatrészt tucatnyi boltot körbejárva sem találtam (ha tud valaki olyan boltot, ahol vásárolható ilyen, kérem írjon). Ilyen célezköz hiányában a modulációt szoftveresen oldottam meg.
A szoftveres moduláció miatt a hardver rendkívül egyszerű lett, a következő alkatrészekre volt szükségem:
- Pic16F690
- 1db infra led
- 1db fotodióda
- 1db npn tranzisztor
- 4db 1kOhm ellenállás
- 2db vörös led (egy a bekapcsolt állapotot jelzi – folyton világít, egy pedig a végeredményt adja meg, hogy érzékel-e jelenlétet az eszköz)
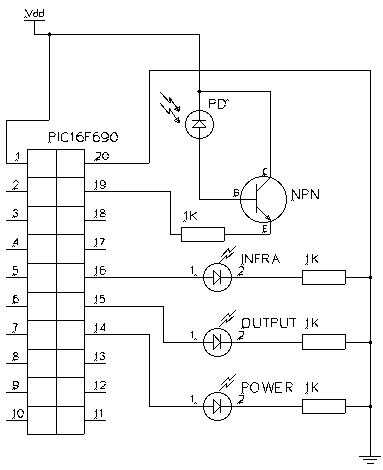
A munkát minimalizálandó felhasználtam a programozóhoz adott próbapanelt, amin beépített ledek állnak rendelkezésre, ezeket felhasználtam az állapotjelzések számára, így csak a fotódiódát és az infraledet kell hozzákötni, ami egy breadboard segítségével könnyedén kivitelezhető. Az infra-ledet a PIC rc0 kimenete fogja meghajtani, egy ellenállással bekötve ez a rész készen van. A kimenetet jelző led az rc1, a power-led az rc2-re van kötve hasonló módon. A fotódiódát a tranzisztorral erősítve kötjük a beépített A/D konverter bemenetére, hogy erősebb jelet kapjunk, ezzel megnövelve az érzékelés felbontását. A további félreértések rövidre zárásához felraktam egy kapcsolási rajzot:
A szoftver ezzel a következő módon tud együttműködni: az alapötlet az, hogy kikapcsolt infra-leddel lemérjük a bejövő fény mennyiségét, majd bekapcsoljuk az infrát, és újra mérünk. A bekapcsolt illetve kikapcsolt infra-led melletti mérések különbsége adja meg az infra-led által leadott és visszavert fény mennyiségét. Ha ez a különbség több iteráció után is meghaladja a küszöbértéket, akkor a kimeneten jelezzük az érzékelt jelenlétet. Azaz két paraméter a küszöbérték (mekkora különbséget várunk el kikapcsolt és bekapcsolt infra-led melletti mérések között), és a kitartás (hány iteráción át kell tartani ezt a különbséget).
És íme, a kód. A dolog nehézségét jelzi, hogy a legtöbb időt két érték összehasonlítása vette el. A kódban szereplő makrót a Microchip MPasm leírásából vettem, én egy kétszer olyan hosszú megoldást csináltam elötte.
#include __config (_INTRC_OSC_NOCLKOUT & _WDT_OFF & _PWRTE_OFF & _MCLRE_OFF & _CP_OFF & _BOR_OFF &
_IESO_OFF & _FCMEN_OFF)
;presence detector code.
;assumed peripheres:
; infra-led on RC0
; photo-diode connected to AN0
; detected proximity output on RC1
; power led on RC2
;
;we measure input on photo diode, while infra-led is turned off.
;then we measure again with turned on infra-led.
;if the infra-ray is reflected from anything, the second measurement
;should return a higher value
;=================================================
;========VARIABLES================================
;=================================================
cblock 0x20
offmeasure ;stores measurement without infra led
onmeasure ;stores measurement with infra led
output ;output bits
waitcount ;wait count
surecount ;make sure that something is there and not moves
endc
OUT_ILED EQU H’0000′ ;bit for infra led
OUT_RES EQU H’0001′ ;bit for output
OUT_POWER EQU H’0002′ ;power led
THRESHOLD EQU H’0002′ ;threshold for measurment gain
SURENESS EQU H’000C’ ;number of measurements before we’re sure in the result
;===================================================
;==============macros for selecting banks
;====================================================
SELECT_BANK0 macro
bcf STATUS,RP0
bcf STATUS,RP1
endm
SELECT_BANK1 macro
bsf STATUS,RP0
bcf STATUS,RP1
endm
SELECT_BANK2 macro
bcf STATUS,RP0
bsf STATUS,RP1
endm
SELECT_BANK3 macro
bsf STATUS,RP0
bsf STATUS,RP1
endm
;==============================================
;=====MACRO TO WAIT=============================
;==============================================
WAIT macro us
local a = 0
while a < us
nop
a += 1
endw
endm
;============================================
;========EXECUTE A MEASUREMENT===============
;============================================
MEASURE macro
WAIT 5
bsf ADCON0,GO ; start conversion
btfsc ADCON0,GO ; this bit will change to zero when the conversion is complete
goto $-1
movf ADRESH,w
btfsc output,OUT_ILED
goto $+3
movwf onmeasure
goto $+2
movwf offmeasure
nop
endm
;========================================
;=======SWITCH output led================
;========================================
SWITCH_ILED macro
movlw 0x01
xorwf output,F
endm
;========================================
;========REFRESH OUTPUT==================
;========================================
REFRESH_OUTPUT macro
movfw output
movwf PORTC
endm
;======================================================
; compare file to constant and jump if file
; >= constant.
;======================================================
cfl_jge macro file, con, jump_to
movlw con & 0xff
subwf file, w
btfsc STATUS, C
goto jump_to
endm
;===============================================
;==============MAIN PROGRAM=====================
;===============================================
org 0
Init:
;set variables to zero
movlw 0x00
movwf output
movwf onmeasure
movwf offmeasure
;set powerled on
bsf output,OUT_POWER
;initialize devices
SELECT_BANK1
movlw 0xFF
movwf TRISA ; Make PortA all input
clrf TRISC ; Make PortC all output
movlw 0x10 ; A2D Clock Fosc/8
movwf ADCON1
SELECT_BANK2
movlw 0xFF ; we want all Port A pins Analoge
movwf ANSEL
SELECT_BANK0
movlw 0x01
movwf ADCON0 ; configure A2D for Channel 0 (RA0), Left justified, and turn on the A2D module
Loop:
MEASURE ;measure with light off
SWITCH_ILED ;turn light on
REFRESH_OUTPUT
call SubWait ;wait a bit
MEASURE ;measure with light on
SWITCH_ILED ;turn light off
call DecideOutput ;decide output
REFRESH_OUTPUT
call SubWait ;wait a bit
goto Loop
;==============================================
;=====Decide output============================
;==============================================
DecideOutput:
;onmeasure-offmeasure >= threshold
movfw offmeasure
subwf onmeasure,F
cfl_jge onmeasure,THRESHOLD,DecideYes
goto DecideNo
DecideYes:
;bsf output,OUT_RES
incf surecount,F
goto DecideOutputReturn
DecideNo:
clrf surecount
bcf output,OUT_RES
DecideOutputReturn:
cfl_jge surecount,SURENESS, SwitchOn
goto SwitchOff
SwitchOn:
bsf output, OUT_RES
return
SwitchOff:
bcf output, OUT_RES
return
;===========================================
;===========Subroutine for long wait========
;===========================================
SubWait:
movlw 0xFF
movwf waitcount
StartWait:
WAIT 100
decfsz waitcount,F
goto StartWait
return
;===============================================
;=====PROGRAM END===============================
;===============================================
end
A kütyüt felprogramoztam, a perifériákat megépítettem, és pár iteratív hibajavítás/paraméterfinomítás után eljutottam arra az állapotra, amit elégségesnek neveztem a koncepció működésének a bizonyítására.

A fenti köntörfalas megfogalmazás nem költői önkifejezés, és nem is véletlen. Az eszköz működik, de épp hogy. A környezet által kifejtett fényerő fehérzajként adódik a rendszerhez, és csak magas “kitartás” és “küszöbérték” paraméter mellett lehet kiszűrni a téves jelzéseket. Ennek az az eredménye, hogy kb. két másodperc után jelzi ha 5cm-nél közelebb teszem a kezemet az infra-led+fotódióda pároshoz. 10cm-nél már bizonytalan a mérés, és akkor is előfordul egy-egy téves jelzés, ha nincs semmi a közelben.
Ezen problémák orvoslására több ötletem is van, egy részük azonnal megoldódna, ha találnék egy rendes infra adó-vevőt. Persze ötleteket, javaslatokat, hasonló problémákban szerzett tapasztalatokat szívesen fogadok.
http://ww1.microchip.com/downloads/en/DeviceDoc/33014g.pdf